
Ing. Electronica


FUNCIONES
Sistema de control automatico
¿Qué es control?
-
•Controlar un proceso consiste en mantener constantes ciertas variables, prefijadas de antemano. Las variables controladas pueden ser, por ejemplo: Presión, Temperatura, Nivel, Caudal, Humedad, etc.
-
Un sistema de control es el conjunto de elementos, que hace posible que otro sistema, proceso o planta permanezca fiel a un programa establecido.
Concepto de señal:
•En los sistemas de control, una magnitud física variable se representa generalmente mediante una señal eléctrica que varía de manera tal que describe dicha magnitud.
•Por ejemplo, una señal eléctrica será la variación de la salida de tensión de un termopar que mide temperatura y la variación de temperatura la transforma en variación de tensión.
•Los dispositivos, circuitos y sistemas electrónicos manipulan señales eléctricas.
Tipos de señales eléctricas:
•Señal analógica (nº infinito de valores) y que tiene una variación continua en el tiempo.
•Señal digital (nº finito de valores) y que tiene una variación discreta de valores en el tiempo.
•Señal digital binaria (dos valores concretos, 1 y 0) la señal eléctrica sólo puede adoptar dos niveles de tensión.
Ventajas de utilizar señales eléctricas
•Resulta muy sencillo procesarlas mediante circuitos electrónicos, que son tanto económicos como fiables.
•Pueden transmitirse sin dificultad a largas distancias.
•Pueden almacenarse para ser posteriormente reproducidas.
Concepto de Sistema:
•¿Qué es un sistema?
Combinación de componentes que actúan interconectados, para cumplir un determinado objetivo.
•¿Cómo se representa un sistema?
Como un rectángulo o caja negra y variables que actúan sobre el sistema. Las flechas que entran (u, excitaciones o entradas). Las flechas que salen (y, variables producidas por el sistema o salidas).
Modelado de Sistemas :
•¿Qué es un modelo?
Es algo que nos ayuda a entender el funcionamiento de un sistema. Puede ser una placa electrónica (hardware) o un conjunto de relaciones matemáticas, en las cuales codificamos el funcionamiento del sistema (es lo que llamamos modelo matemático) y que eventualmente puede desarrollarse en un programa de ordenador.
•Modelado Entrada - Salida:
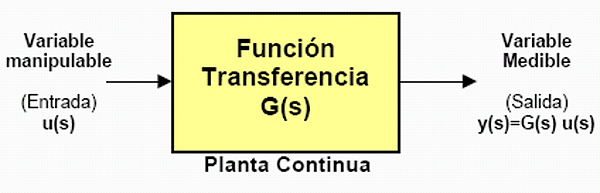
Uno de los enfoques de modelado más útiles para propósitos de control es el Modelado Externo o entrada / salida. Este tipo de modelo describe la relación estímulo - respuesta del proceso y conduce a la llamada Función Transferencia del proceso.
Función de Transferencia :
Función de transferencia de un sistema se indica por G(s), y es el cociente entre la transformada de Laplace de la señal de salida y la transformada de Laplace de la señal de entrada
Diagramas de Bloques:
Tipos de control, atendiendo al circuito implementado :
•Control manual: El operador aplica las correcciones que cree necesarias.
•Control automático: La acción de control se ejerce sin intervención del operador y su solución es cableada, es decir, rígida, no se puede modificar.
•Control programado: Realiza todas las labores del control automático, pero su solución es programada. Se puede modificar su proceso de operación o ley de control.
Estructura de un sistema de control:
•Tenemos dos tipos de estructura diferente de lazo de control:
•Sistemas de control en LAZO ABIERTO
Aquel en el que ni la salida ni otras variables del sistema tienen efecto sobre el control. NO TIENE REALIMENTACIÓN
•Sistemas de control en LAZO CERRADO
En un sistema de control de lazo cerrado, la salida del sistema y otras variables, afectan el control del sistema. TIENE REALIMENTACIÓN
Elementos que componen un sistema de control:
Variable de proceso,PV:
•La variable medida que se desea estabilizar (controlar) recibe el nombre de variable de proceso ("process value") y se abrevia PV.
•Un buen ejemplo de variable de proceso es la temperatura, la cual mide el instrumento controlador mediante un termopar o una Pt100.
Set Point SP o Consigna
•El valor prefijado (Set Point, SP) es el valor deseado de la variable de proceso,es decir, la consigna.
•Es el valor al cual el control se debe encargar de mantener la PV.
•Por ejemplo en un horno la temperatura actual es 155 °C y el controlador esta programado para llevar la temperatura a 200°C.
•Luego PV=155 y SP=200.
Error E
•Se define error como la diferencia entre la variable de proceso PV y el set point SP,
•E = SP - PV
•En el ejemplo anterior
E = (SP - PV) = (200°C - 155°C) = 45 °C.
•Recuerde que el error será positivo cuando la temperatura sea menor que el set point, PV < SP .
Control proporcional:
•El controlador proporcional entrega una potencia que varía en forma proporcional al error (SP-PV).
•Para poner en marcha un controlador proporcional se deben fijar los siguientes parámetros:
–La temperatura deseada SP , por ej. SP = 200 °C
–La banda proporcional Pb, por ej. Pb = 10 %.
•La banda proporcional Pb se programa en el controlador como un porcentaje del SP.
•banda = Pb x SP/100%









#include<iostream>
#include<math.h>
using namespace std;
float E,SP,PV,SP1,PB,Rt,Q,GH,GH2,r,G,inicial,final,INICIAL2,FINAL2,inicial3,final3;
void datos1();
float Error(float x);
void datos2();
float banda(float x,float y);
void datos3();
float Senales(float x);
void datos4();
float ganancia(float x);
int main(){
int opcion;
do{
cout<<"**************Sistemas De Control Automatico**************\n";
cout<<endl;
cout<<"1) ERROR\n";
cout<<"2) Banda de control proporcional\n";
cout<<"3) Señal de error\n";
cout<<"4) Ganancia de lazo cerrado\n";
cout<<endl;
cin>>opcion;
if(opcion>0,opcion<6){
switch (opcion){
case 1:{
cout<<"ERROR*\n";
cout<<endl;
datos1();
INICIAL2=6;
FINAL2=15;
for(PV=INICIAL2;PV<=FINAL2;PV=PV+2)
{
E=Error(SP);
cout<<"Cuando la variable de proceso es : "<<PV<<" el ERROR ES : "<<E<<" GRADOS C"<<endl;
}
cout<<endl;
break;
}
case 2:{
cout<<"*******Banda de control proporcional*******\n";
cout<<endl;
datos2();
cout<<endl;
cout<<endl;
banda(PB,SP1);
break;
}
case 3:{
cout<<"*******Señal de error*******\n";
cout<<endl;
datos3();
cout<<endl;
cout<<endl;
inicial=0;
final=30;
for(GH>=inicial;GH<=final;GH=GH+5){
float es=Senales(r);
cout<<"Cuando la ganancia de lazo es : "<<GH<<" La Señal de error: "<<es<<endl;
}
break;
}
case 4:{
cout<<"*******Ganancia de lazo cerrado*******\n";
cout<<endl;
datos4();
inicial3=0;
final3=30;
for(G>=inicial3;G<=final3;G=G+5){
float es=ganancia(GH2);
}
break;
}
}
}else
cout<<"Opcion no existente\n";
cout<<endl;
cout<<endl;
}while (opcion!=0);
return(0);
}
void datos1(){
cout<<"Ingrese el Valor de SET POINT: ",cin>>SP;
}
float Error(float x){
float E=SP-PV;
return E;
}
void datos2(){
cout<<"Ingrese la temperatura deseada : ",cin>>SP1;
cout<<"Ingrese la banda proporcional: ",cin>>PB;
}
float banda(float x,float y){
float C=x*y/100;
cout<<"La BANDA DE CONTROL ES : "<<C<<" GRADOS C"<<endl;
cout<<endl;
}
void datos3(){
cout<<"Ingrese La señal de referencia: ",cin>>r;
}
float Senales(float x){
float e=r/(1+GH);
return e;
}
void datos4(){
cout<<"Ingrese La Ganacia de Lazo: ",cin>>GH2;
}
float ganancia(float x){
float F=G/(1+GH2);
cout<<"Cuando la ganancia directa es : "<<G<<" La ganancia de lazo cerrado es : "<<F<<endl;
}

